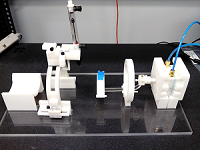
We needed to build a prototype and make sure the accepted precision of the device is within +15 ms and a standard deviation of less than 5 ms. We designed a vane actuator, where compressed air rotates a shaft by pressurizing one side of a chamber. We also fabricated the coupling system between the hand clamp and the shaft, a rotary support to reduce the stress on the shaft, and put everything together from the ground up (note the part with the cylinder was made by the previous year's project). The last step is to conduct experiments to validate the accuracy of the robot. After much difficulty finding an adequate measuring instrument, we finally managed to determine the maximum standard deviation of the vane actuator is 2.9 ms with pressures over 30 psi. Then, a test is conducted on the final prototype with a load and fortunately the maximum deviation is calculated to be 4.4 ms with pressures over 42 psi. All in all, our project did meet the requirements for performing RFE but improvements should definitely be made. For instance, there is a significant amount of air leakage in the vane actuator which means the device is very inefficient. Moreover, the majority of the parts are 3D printed due to time constraints so the device needs to be made stronger.
I definitely learned a lot during my CCEFP experience. As it is my first time being involved in such a program, I figured out you can't be afraid to tackle on new problems. There will always be miscellaneous issues on the way and you can't let it dishearten you. Rather, it is important to struggle and do your best to make the most out of the situation. I had a lot of difficulty manufacturing certain parts for the project, but in the end the hands-on experience taught me much more about design than any class could. Well, I'm still working on my research paper, trying to make it as comprehensive as possible for my adviser, so I'll close off this blog by saying thanks to everybody who made this experience possible. To Alyssa, all my fellow REUs, and those who helped me from the CCEFP!
No comments:
Post a Comment