The objective of my research this summer was to determine the effects
of CO2 tank cooling as a power source for the Portable Power Ankle-Foot
Orthosis. It was anticipated that fuel usage would increase and
performance decrease due to cooling the CO2 tank undergoes during
operation.
The results showed that fuel was consumed
consistently at all tank temperatures experienced during operation, this
was the opposite of expectations. Also observed was unstable pressure
resulting in unreliable power output from the actuator, and suggestions
were made on possible mechanical systems that could remedy this problem.
This
was all outlined in the following power point presentation, and if
anyone has any questions they can contact me at email at any time.
presentation link:
https://app.box.com/s/g4kifnodzwvo32r0l07c
Timothy Anderson
timothy.anderson-2@mnsu.edu
mechanicalengineer85@gmail.com
Tuesday, August 12, 2014
Friday, August 8, 2014
Aaron Bouncer's Final Blog
Our project was to simulate the task of a nurse moving a patient from the bed to their wheelchair with a patient transfer device and to evaluate any types of stress or possible opportunities for musculoskeletal disorder (MSD) in Jack Simulation. One of our team members, Kiffinae Sanders, created a survey and created a task analysis to get a better picture of where and how strain is put on nurses when they operate a Hoyer lift.
We tested both the original patient transfer device aka Hoyer lift and the fluid powered patient transfer device to see if there would be any difference in lower back stress, task time and percentage capable.
Our end result was that the fluid power device was better when it came to lower back relief and time to complete task but it is a prototype and still needs some tweaking. All in all I believe we met our objective.
The only thing I wasn't able to complete was the Static Strength Prediction (SSP) for the fluid powered device so I was not able to get the percent capable with this task but with the other data we got I can say that our results show which machine is a better choice.
What I will take away from this experience is how much work and dedication you must have in order get any type of result whether it is good or bad. Its better to get something than nothing. I'll also take away the fun times I've had here.
And my advice for future REU students would be prepare to read because you will be reading....... a lot!
Anyway it was fun and I'm glad for the experience.

We tested both the original patient transfer device aka Hoyer lift and the fluid powered patient transfer device to see if there would be any difference in lower back stress, task time and percentage capable.
Our end result was that the fluid power device was better when it came to lower back relief and time to complete task but it is a prototype and still needs some tweaking. All in all I believe we met our objective.
The only thing I wasn't able to complete was the Static Strength Prediction (SSP) for the fluid powered device so I was not able to get the percent capable with this task but with the other data we got I can say that our results show which machine is a better choice.
What I will take away from this experience is how much work and dedication you must have in order get any type of result whether it is good or bad. Its better to get something than nothing. I'll also take away the fun times I've had here.
And my advice for future REU students would be prepare to read because you will be reading....... a lot!
Anyway it was fun and I'm glad for the experience.
Test Bed 4 Presentation
Final Blog
Our objective was to simulate the task of nurses operating the patient transfer device(test bed #4) in a digital human modeling software called Jack and analyze how the new and improved device is more efficient and causes less strain on people operating it. My colleagues and I have successfully met out objective by collecting data on both the traditional patient transfer device and the fluid power one. The data we received proved that the fluid power device is much more efficient and creates less stress on the caregiver who operates it. Our faculty and graduate student that we were working with were pleased with what we gathered and I am grateful to be given the opportunity to do research with them and for CCEFP for providing me with experience on how to conduct research and understanding how important fluid power is in todays industries.
One thing i will take away from this research experience is how to effectively collaborate with people in different areas of study and being able to communicate in a language we both can understand. Also, I am very excited to have been able to conduct research and be apart of something so important that can have a positive impact on someone else's life.
 I would like to thank the awesome people at CCEFP, Purdue University, NSF, as well as NC A&T for allowing me to be apart of such great organizations. I'm so grateful and thankful to be given such a wonderful opportunity. In the near future I plan on conducting more research and hopefully working along with CCEFP and NSF to help make something else in this world better.
I would like to thank the awesome people at CCEFP, Purdue University, NSF, as well as NC A&T for allowing me to be apart of such great organizations. I'm so grateful and thankful to be given such a wonderful opportunity. In the near future I plan on conducting more research and hopefully working along with CCEFP and NSF to help make something else in this world better.
One thing i will take away from this research experience is how to effectively collaborate with people in different areas of study and being able to communicate in a language we both can understand. Also, I am very excited to have been able to conduct research and be apart of something so important that can have a positive impact on someone else's life.
Week 8
My job first started off with me having to research and get more information on what a transfer device looks like, how it works, etc. Once I was able to gain a firm understanding then I was to create a hierarchy task analysis and with those recorded steps we were to determine which step is the most important. With that step being acknowledged Shae and Aaron were then to simulate that in process in Jack Simulations. Not only that but to be able to get a better understanding of where the nurses pain(s) were coming from I created a survey. The end result is that we were able to cut the relief of all stress and strains on nurses lower back, neck, shoulders, and wrist by almost half. I would say that all of our work was very conclusive and met all standards an objectives that we were given this summer. Due to the fact that our graduate student left the country for almost a month set us back in work ethics just a little but non the less we still managed to present an outstanding and pretty referable information. Everything on my end was completed. I will take away the memories that I gained with my fellow co-workers and as well as graduates students and staff! This experience is one that I will never forget and has opened many more doors for me. The only advice I have to offer is don't rush your time away. Utilize all of your time because deadlines will sneak up on you and you WILL have to present no matter what you have prepared. Oh and of course ENJOY THIS AMAZING EXPERIENCE!!!! It was such a pleasure to have encountered each and every REU and I wish you the best of luck in your future endeavors!!
PEACE, LOVE, AND HAPPINESS!!
Kiffinae D. Sanders
PEACE, LOVE, AND HAPPINESS!!
Kiffinae D. Sanders
Synopsis of the Strain Energy Accumulator Research
Hello all!
This summer has gone by too quickly, but it has been an awesome ride here in Nashville. As a research team, we have grown closer together as friends, as well as make ample progress to our goals for the summer. They have been great to work with and are some of the sharpest tools in the shed!
Research Results
The purpose of my research this summer, was to prove that conductive elastomers can successfully be used to monitor damage inflicted upon them. The material that is in development for use in the Strain Energy Accumulator will need to successfully determine if critical damage has been inflicted. To prove this, we tested an on-the-market conductive elastomer. The following tests were performed:
 This polypropylene tube is filled with hydraulic fluid and begins to balloon, much like an animal ballon. The energy is stored in the strain of the elastomeric material and can be harvested during discharge.
This polypropylene tube is filled with hydraulic fluid and begins to balloon, much like an animal ballon. The energy is stored in the strain of the elastomeric material and can be harvested during discharge.
Closing
I would like to thank the CCEFP, Dr. Adams, Dr. Barth, and the rest of my research team for giving me the resources that I needed to complete my research this summer! The experience for myself was wonderful and is something that I will take with me through out my life and career. Living in Nashville has been a blessing, and I have met some amazingly talented and respectable people along the way. Again, thanks for everything. I look forward to seeing all of my fellow REU's in our future careers, and I hope to stay in contact.

This summer has gone by too quickly, but it has been an awesome ride here in Nashville. As a research team, we have grown closer together as friends, as well as make ample progress to our goals for the summer. They have been great to work with and are some of the sharpest tools in the shed!
Research Results
The purpose of my research this summer, was to prove that conductive elastomers can successfully be used to monitor damage inflicted upon them. The material that is in development for use in the Strain Energy Accumulator will need to successfully determine if critical damage has been inflicted. To prove this, we tested an on-the-market conductive elastomer. The following tests were performed:
1) Damage Infliction -- we purposefully scratched and cut the material to measure resistance changes. The results formulated gave us insight into how the material shows promising directional sensing abilities. This is shown especially with the vertical abrasion, which permanently eliminated conductance in the material.
2) Tensile Test -- a test rig was configured to observe how the resistance changes with increasing load, as well as the hysteresis and Mullens effects of the elastomer. This test yielded repeatable results and really gave me insight into how conductive elastomers will actually react in an application
This research successfully proved that elastomers can be used practically when sensing applications are necessary! Though the research did give our team a proof-of-concept, the material tested has many shortcomings for our application including: deficient durability, single sided conductance (conductance only on surface level of the elastomer), and conductance at only small strains (< 100%).
Future Work
A couple of trials are going to be done with this conductive material. The research team will adhere a rectangular specimen to the current Strain Energy Accumulator design, with attached leads to monitor resistance changes through out charge and discharge. Secondly, a specimen will be glued to a elastomeric sample during tensile testing on an MTS machine. Each of these experiments will gives us insight into the reactions that can be expected in practical applications. Here is a picture of our accumulator that was made this summer:
Closing
I would like to thank the CCEFP, Dr. Adams, Dr. Barth, and the rest of my research team for giving me the resources that I needed to complete my research this summer! The experience for myself was wonderful and is something that I will take with me through out my life and career. Living in Nashville has been a blessing, and I have met some amazingly talented and respectable people along the way. Again, thanks for everything. I look forward to seeing all of my fellow REU's in our future careers, and I hope to stay in contact.
Thursday, August 7, 2014
Final Post - Don
Hello everyone,
It has been a great summer. There is no doubt about that. Here is a summary of everything I have been working on this summer.

It has been a great summer. There is no doubt about that. Here is a summary of everything I have been working on this summer.
Gas-Power-Cycle-Specific
Pulley Optimization for a Walking-Engine-Actuated Active Ankle-Foot Orthosis
Donald H. Kuettel III MSOE REU 2014
Outcome
The main
goal of this research was to help people with disabilities regain natural
walking ability by replicating the normal walking gait of a human through the
use of a walking-engine-actuated active ankle-foot orthosis (AAFO). This was
done using an internal-combustion engine and pulley system to reproduce the
moment experienced at the ankle during gait. Through this research, the optimal
pulley geometry was determined for the AAFO, but had a very complicated
geometry.
Impact/Benefit
Active orthotic devices for joint articulation have a vast
number of applications that could benefit many people. Individual examples of
this include: joint articulation for people suffering from disabilities,
increased load carrying capacity and walking distance for humans, and gait
training applications. The
results of this research provided insight and laid
the groundwork for future experiments for
the further development of un-tethered, compact, lightweight, efficient,
long-lasting, and safe AAFO devices.
Explanation
This research investigated the
optimization of a pulley system for the primary actuator of an AAFO utilizing a
high-efficiency pneumatic “Walking Engine”. The AAFO’s internal-combustion (IC)
engine was characterized using a dual-combustion (limited-pressure)
gas-power-cycle model. Using the dual-combustion model, both a pressure-volume
diagram and the thermodynamic engine efficiency were calculated. The moment
experienced at the ankle due to the AAFO was calculated using the pressures in
the AAFO engine. By finding the pressure in the AAFO engine as a function of
time and multiplying it by the cross-sectional area of the actuator piston, the
force output of the engine was then determined. Finally, by dividing the
optimal ankle moment by the engine’s force output, the optimal pulley geometry
was found as a function of time.
Meeting everybody involved in the REU Program has been a great honor. I will give the whole parting words thing a shot. In my opinion one of the most important aspects of research is to share
the knowledge that you have gained. It is only through this process of sharing
that the world as a whole may benefit from the research that has been done. So get out here and don't be afraid to tell people about the great accomplishments that you have made.
This is Donald Harry Kuettel III signing off.
Final Blog - Emily
Hi everyone!
It's hard to believe just 10 weeks ago we were all sitting in the conference room at Purdue getting (for some of us) our first taste of what Fluid Power is. I feel I have grown both personally and professionally over the last 10 weeks and I am very grateful to have had this opportunity.
The goal of my research this summer was to help my mentor develop the hardware for a non-invasive skull base approach to radiofrequency ablation of the hippocampus as a therapy for epilepsy. My mentor has created a robot that advances a thin needl
e in a inchworm manner through a docking tube that guides the needle through the foramen ovale, a naturally hole in the skull near the cheek. The needle will advance towards the hippocampus and when it is in place, radiofrequency ablation will be used to "cook" or destroy the majority of the tissue comprising the hippocampus in an effort to treat epilepsy. Pneumatics is a great source of power for this system because it can be designed to contain primarily non-magnetic parts. This allows the whole procedure to be monitored in real time within an MRI scanner which is favorable over CT or ultrasound.
I have two primary contributions to this work. At the start of the summer, I experimented with radiofrequency ablation to discover what parameters will "cook" the largest amount of tissue. Many variables need to be taken into consideration such as diameter of the ablator, power, and time. The second half of the summer, I worked with CT and MRI scans to segment the skull, foramen ovale, hippocamups, and amygdala. This will be helpful to the future of the project because the figures can be used in computer simulations to model the procedure and help fine tune the needle design.
 I have learned a lot of things this summer outside the technical components of my research. I have learned to stay disciplined and self motivated. I have learned to ask questions and not be afraid to ask for help. I have learned how even though everyone is working on separate projects, everyone is eager to contribute their own expertise when necessary. I have learned to be patient and realize many things take days, weeks, or months to accomplish. It was very exciting this summer to experience the research environment here at Vanderbilt.
I have learned a lot of things this summer outside the technical components of my research. I have learned to stay disciplined and self motivated. I have learned to ask questions and not be afraid to ask for help. I have learned how even though everyone is working on separate projects, everyone is eager to contribute their own expertise when necessary. I have learned to be patient and realize many things take days, weeks, or months to accomplish. It was very exciting this summer to experience the research environment here at Vanderbilt.
I would like to thank Dr. Barth and Dave for being excellent mentors this summer. I would like to thank my lab mates Anna, Bryn, and Alex for welcoming me to the lab. I would like to thank Alyssa for being so fantastic at keeping us all connected this summer and helping organize such an amazing program. Finally, I would like to thank all my fellow REUs for sharing their experiences over the blog and allowing me to learn even more the wide range of applications of Fluid Power.
It's hard to believe just 10 weeks ago we were all sitting in the conference room at Purdue getting (for some of us) our first taste of what Fluid Power is. I feel I have grown both personally and professionally over the last 10 weeks and I am very grateful to have had this opportunity.
The goal of my research this summer was to help my mentor develop the hardware for a non-invasive skull base approach to radiofrequency ablation of the hippocampus as a therapy for epilepsy. My mentor has created a robot that advances a thin needl
e in a inchworm manner through a docking tube that guides the needle through the foramen ovale, a naturally hole in the skull near the cheek. The needle will advance towards the hippocampus and when it is in place, radiofrequency ablation will be used to "cook" or destroy the majority of the tissue comprising the hippocampus in an effort to treat epilepsy. Pneumatics is a great source of power for this system because it can be designed to contain primarily non-magnetic parts. This allows the whole procedure to be monitored in real time within an MRI scanner which is favorable over CT or ultrasound.
I have two primary contributions to this work. At the start of the summer, I experimented with radiofrequency ablation to discover what parameters will "cook" the largest amount of tissue. Many variables need to be taken into consideration such as diameter of the ablator, power, and time. The second half of the summer, I worked with CT and MRI scans to segment the skull, foramen ovale, hippocamups, and amygdala. This will be helpful to the future of the project because the figures can be used in computer simulations to model the procedure and help fine tune the needle design.
I have learned a lot of things this summer outside the technical components of my research. I have learned to stay disciplined and self motivated. I have learned to ask questions and not be afraid to ask for help. I have learned how even though everyone is working on separate projects, everyone is eager to contribute their own expertise when necessary. I have learned to be patient and realize many things take days, weeks, or months to accomplish. It was very exciting this summer to experience the research environment here at Vanderbilt.I would like to thank Dr. Barth and Dave for being excellent mentors this summer. I would like to thank my lab mates Anna, Bryn, and Alex for welcoming me to the lab. I would like to thank Alyssa for being so fantastic at keeping us all connected this summer and helping organize such an amazing program. Finally, I would like to thank all my fellow REUs for sharing their experiences over the blog and allowing me to learn even more the wide range of applications of Fluid Power.
Week Ten
Hey y'all,
I can't believe that it's the end of the program already. Summer went by quickly, which is a shame. Anyway, I hope all y'all had a great experience with your programs (and by reading your blogs, it looks like you did) and that everyone has safe travels back home. And, of course, that everyone keeps in touch.
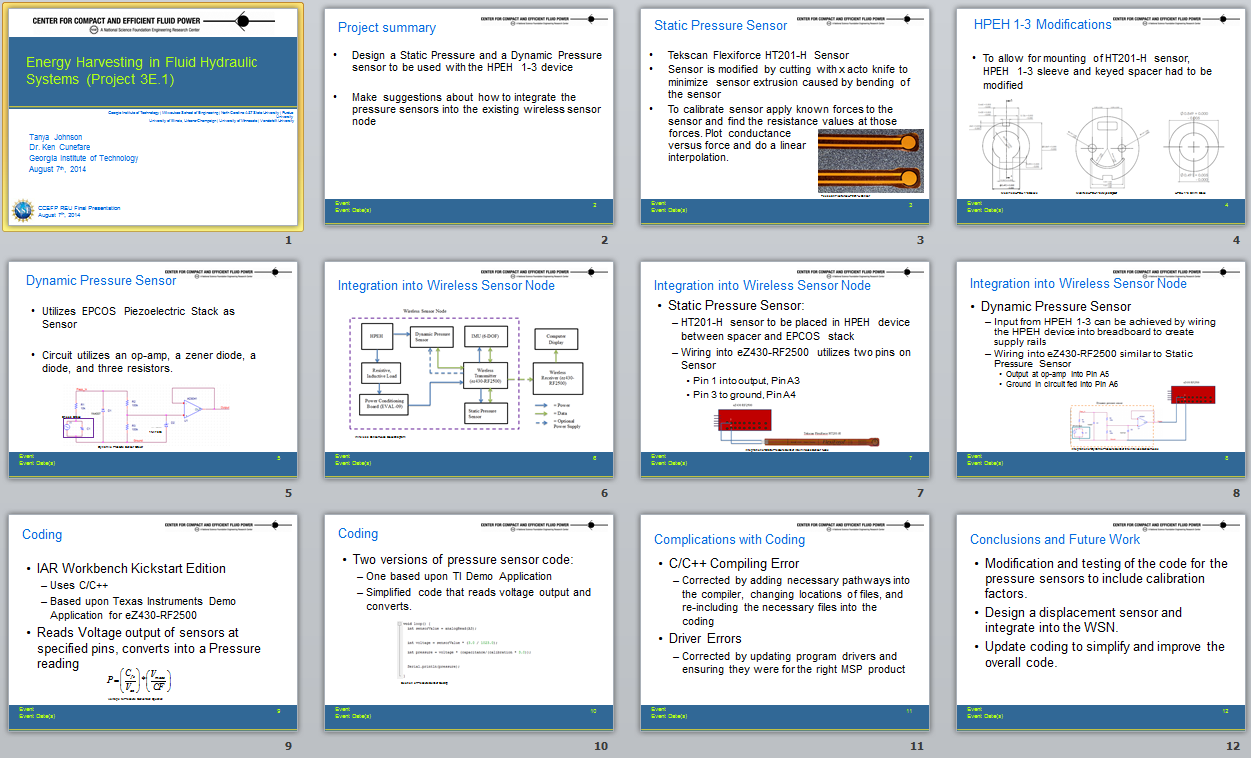
Now, onto my final report on my project. Unfortunately I cannot disclose some of what I've done outside of the work I did on the dynamic and static pressure sensors due to the fact that it is propriety with a company and I've signed an NDA. So, I'll just stick to the proof-of concept sensors I was working on and how that turned out, though I did do work on other things over the course of the summer. A large portion of my research was done on the HPEH devices themselves, which I cannot discuss, and the other portion was working on the design of a dynamic and static pressure sensor circuits which would then be integrated into a wireless sensor network (WSN). So I'll be sticking to the WSN and the pressure sensors, which went fairly well and the presentation I did today on them went well.
Over the course of the summer, I had to put my knowledge of EE (which isn't nonexistent, I've taken a good number of EE classes with two pertaining to electronics) in order to design a dynamic pressure sensing circuit that utilizes a component of the HPEH devices to provide the pressure sensing and a second sensor, a static pressure sensor. The static sensor utilizes and off-shelf sensor base that is integrated into an overall circuit that was suggested by the manufacturer. Both of the circuits can be optimized, and should be optimized, in the future to provide a better output voltage. The static pressure sensor utilizes a resistance based sensor that will be wired into the requisite circuit then connected into the WSN. The dynamic pressure sensor utilizes a zener diode, a diode, three resistances, and an op-amp all of which can be seen in the circuit diagram below. Essentially all of the components other than the op-amp are included in the circuit to ensure that the op-amp will not overload, as (in my experience destroying op-amps and diodes in electronics labs, diodes smell awful never burn out a diode) it is not advised or an enjoyable experience to be had. Future students involved with this WSN project will be optimizing the circuits, especially the resistor values, to better improve the circuit.

A snapshot of my powerpoint presentation can be seen below. I didn't make a poster, but I did a presentation and am presently working on completing a few reports (a final report and then a progress report on one of the HPEH devices), along with creating a three paragraph capstone summary to try and get a group of EEs to work on the WSN and the coding.
I can't believe that it's the end of the program already. Summer went by quickly, which is a shame. Anyway, I hope all y'all had a great experience with your programs (and by reading your blogs, it looks like you did) and that everyone has safe travels back home. And, of course, that everyone keeps in touch.
Now, onto my final report on my project. Unfortunately I cannot disclose some of what I've done outside of the work I did on the dynamic and static pressure sensors due to the fact that it is propriety with a company and I've signed an NDA. So, I'll just stick to the proof-of concept sensors I was working on and how that turned out, though I did do work on other things over the course of the summer. A large portion of my research was done on the HPEH devices themselves, which I cannot discuss, and the other portion was working on the design of a dynamic and static pressure sensor circuits which would then be integrated into a wireless sensor network (WSN). So I'll be sticking to the WSN and the pressure sensors, which went fairly well and the presentation I did today on them went well.
Over the course of the summer, I had to put my knowledge of EE (which isn't nonexistent, I've taken a good number of EE classes with two pertaining to electronics) in order to design a dynamic pressure sensing circuit that utilizes a component of the HPEH devices to provide the pressure sensing and a second sensor, a static pressure sensor. The static sensor utilizes and off-shelf sensor base that is integrated into an overall circuit that was suggested by the manufacturer. Both of the circuits can be optimized, and should be optimized, in the future to provide a better output voltage. The static pressure sensor utilizes a resistance based sensor that will be wired into the requisite circuit then connected into the WSN. The dynamic pressure sensor utilizes a zener diode, a diode, three resistances, and an op-amp all of which can be seen in the circuit diagram below. Essentially all of the components other than the op-amp are included in the circuit to ensure that the op-amp will not overload, as (in my experience destroying op-amps and diodes in electronics labs, diodes smell awful never burn out a diode) it is not advised or an enjoyable experience to be had. Future students involved with this WSN project will be optimizing the circuits, especially the resistor values, to better improve the circuit.
Along with the design of the sensors, they had to be integrated into the WSN and then coded. The integration involved a slight redesign of the a HPEH device to accommodate the Flexiforce sensor, but I cannot discuss the intricacies of the redesign. Along with discussing a way to allow the HPEH to power both a power optimization circuit and the dynamic sensor, which can be done by use of voltage rails. One of the components of the WSN will also be used to create voltage rails to power the Flexiforce sensor, an IMU and thermistor that were previously designed, and the op-amp used in the dynamic sensor (if needed, as it may not need those voltages to turn the op-amp on, that is just a just-in-case scenario). All of the sensors will be wired into the WSN and then coding was done in order to properly read and convert voltages into pressures.
The coding was a pain and the program consistently had the same errors despite my fixing them (repeatedly) and some runs they would work, others they wouldn't. So that was extremely frustrating, but all in all the coding went okay, the code should work as expected due to how it is just reading an output at a pin and converting. I didn't get around to calibrating the pins, so there are some variables left in the coding but I have left in depth notes about what each variable means and how to modify the code, though it is a rather straight-forward code.
A snapshot of my powerpoint presentation can be seen below. I didn't make a poster, but I did a presentation and am presently working on completing a few reports (a final report and then a progress report on one of the HPEH devices), along with creating a three paragraph capstone summary to try and get a group of EEs to work on the WSN and the coding.
Future plans for the proof-of concept WSN is to design a displacement sensor and to improve upon the coding, hopefully making it more accurate and to actually get IAR to work properly. Which is why Dr. C wants to try and get some EEs or CEs involved as they should have a stronger coding background in C or C++. Ultimately the WSN and all of the sensors will be integrated and tested on GT's test rig and possibly with one of the test rigs at Purdue, which would be really cool.
What I'm taking away from this experience was that I do want to go to Grad School (good thing I figured that out now, since I need to apply within the next few months) and that I'm fairly certain I want to go into an acoustics and thermofluids related field, possibly with regards to energy maybe not but I definitely do what to consider pursuing this kind of acoustics work. Along with how to put together an indepth report, presentation, and (as I was assigned this today) a possible Capstone summary which I need to figure out how to write. Along with how to communicate through emails and to improve my communication skills and research skills.
- Tanya
Wednesday, August 6, 2014
Project Summary and Final Post
Hi all,
I can't believe that the ten weeks are almost over! I'm very happy with the progress I've made on my project, though there still is much more work that could be done. Attached is my poster summarizing the work I've done this summer...

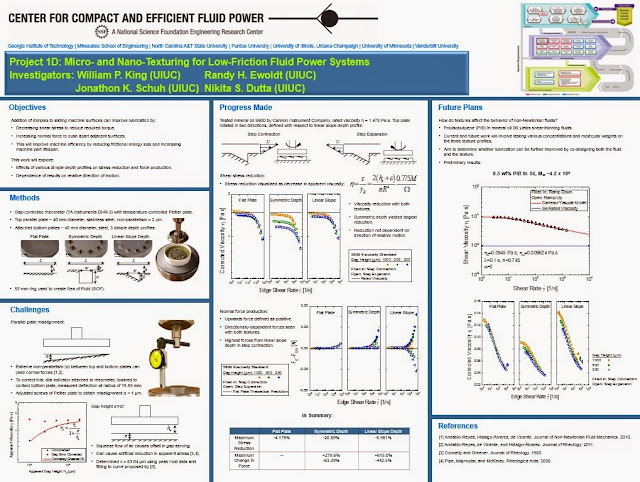
My project this summer was about the triboelectric effect in return line and tank mounted filters. The triboelectric effect is the phenomenon responsible for most everyday static electricity, and occurs in filtration systems between the filter media and the oil because of the large amount of contact between the two. Previous research at MSOE has discovered that replacing filter component materials with electrostatic dissipative (ESD) materials can greatly decrease the electrostatic charge generation in tank mounted filters, but is less effective in return line filters. My goal this summer was to determine why the ESD material worked so well in tank mounted filters, and not as well in return line filters.
One of my first theories was about the velocity of the oil through the filter media - each filter element has a different shape and size, so the velocity profiles through them would also be different. Although the data from running these tests revealed some interesting facts about charge relaxation, it didn't suggest that the different amounts of generated charge were from different velocity profiles.
My next idea focused on the electrical circuits created by the ESD materials. ESD materials have a higher resistivity than conductors, but still do allow the movement of electrons and will create an electric bond between their boundaries. The use of ESD materials in the tank mounted filter created a bond between the bulk oil in the tank and the filter media, while this connection did not exist in the return line filter. To test this theory, I inserted conductors as necessary into the return line filter system to create this bond. So far, my data suggests that this was the cause of the increased charge generation in the return line filter system!
As I mentioned before, there still is a lot of possible future work to do on this project. Firstly, the way I setup the return line filter with the added conductors changed several other variables - such as the pressure at the filter and oil flow rate. Although I have reasons to believe these wouldn't significantly influence the charge generation, it would be best to create a setup that was identical in every other way to the previous setup. Secondly, the data acquired from the first set of tests (that varied the velocity of the oil through the filter) has several interesting trends; what I'm working on now is trying to fit an equation to all of the data.
As for advice for a future REU student, I would suggest trying to stay ahead of schedule as much as possible; ten weeks sounds like a long time at the start but it goes by quickly! I think one of the biggest things I will take away from this summer is an appreciation for how big the fluid power industry is. For my REU program, I was lucky enough to be able to work in MSOE's Fluid Power Institute (FPI). Not only did I get to see the other projects at the FPI, I also got to go to several events hosted by the FPI, such as a tour of a Caterpillar hydraulics factory, and talk to many different professionals in working in fluid power. Before applying to CCEFP's REU program, I hadn't really heard about fluid power, but now I realize how exciting and diverse of a field it is!
I can't believe that the ten weeks are almost over! I'm very happy with the progress I've made on my project, though there still is much more work that could be done. Attached is my poster summarizing the work I've done this summer...
My project this summer was about the triboelectric effect in return line and tank mounted filters. The triboelectric effect is the phenomenon responsible for most everyday static electricity, and occurs in filtration systems between the filter media and the oil because of the large amount of contact between the two. Previous research at MSOE has discovered that replacing filter component materials with electrostatic dissipative (ESD) materials can greatly decrease the electrostatic charge generation in tank mounted filters, but is less effective in return line filters. My goal this summer was to determine why the ESD material worked so well in tank mounted filters, and not as well in return line filters.
One of my first theories was about the velocity of the oil through the filter media - each filter element has a different shape and size, so the velocity profiles through them would also be different. Although the data from running these tests revealed some interesting facts about charge relaxation, it didn't suggest that the different amounts of generated charge were from different velocity profiles.
My next idea focused on the electrical circuits created by the ESD materials. ESD materials have a higher resistivity than conductors, but still do allow the movement of electrons and will create an electric bond between their boundaries. The use of ESD materials in the tank mounted filter created a bond between the bulk oil in the tank and the filter media, while this connection did not exist in the return line filter. To test this theory, I inserted conductors as necessary into the return line filter system to create this bond. So far, my data suggests that this was the cause of the increased charge generation in the return line filter system!
As I mentioned before, there still is a lot of possible future work to do on this project. Firstly, the way I setup the return line filter with the added conductors changed several other variables - such as the pressure at the filter and oil flow rate. Although I have reasons to believe these wouldn't significantly influence the charge generation, it would be best to create a setup that was identical in every other way to the previous setup. Secondly, the data acquired from the first set of tests (that varied the velocity of the oil through the filter) has several interesting trends; what I'm working on now is trying to fit an equation to all of the data.
As for advice for a future REU student, I would suggest trying to stay ahead of schedule as much as possible; ten weeks sounds like a long time at the start but it goes by quickly! I think one of the biggest things I will take away from this summer is an appreciation for how big the fluid power industry is. For my REU program, I was lucky enough to be able to work in MSOE's Fluid Power Institute (FPI). Not only did I get to see the other projects at the FPI, I also got to go to several events hosted by the FPI, such as a tour of a Caterpillar hydraulics factory, and talk to many different professionals in working in fluid power. Before applying to CCEFP's REU program, I hadn't really heard about fluid power, but now I realize how exciting and diverse of a field it is!
Weeks Nine & Ten
These past ten weeks have gone by so much faster than I expected, but I did get a lot done on my project in that time. After spending quite a while trying to improve our error calibration procedure (since without accurate calibrations, we have no way of judging how trustworthy our data is), we've obtained some useful results with our textured surfaces. The symmetric depth texture reduced the apparent viscosity of our most viscous fluid by 20.7%, while the linear slope depth textured gave a 6.49% reduction. Both textures also produced significantly higher normal forces than our flat plate control, with the linear slope depth texture producing the most. These results are important because stress reduction and force production are both key factors in improved lubrication, as stress reduction (or friction reduction, really) will lower the amount of energy required to move sliding machine surfaces, and increased normal force will push apparent adjacent surfaces to prevent wear and tear on machine parts.
These past few weeks, I've shifted my focus away from Newtonian oils and done some preliminary work with non-Newtonian fluids, since our ultimate goal is to be able to co-design both the surface and the fluid in order to improve lubrication even more. Our non-Newtonian results have been promising; the stress reductions seem to show the same pattern as the Newtonian fluids did, with the symmetric depth texture causing significantly more of a drop than the linear slope depth. The normal force data is a little less clear right now, as while the fluids have been producing forces even with the flat plate, the difference in force production between the flat plate and the textured plates seems largely negligible. We haven't done any repeat testing yet, however, so this may clear up more when we are able to go back and do multiple trials on the same fluid.
Overall, I'm leaving this project feeling pretty good about the progress we've made, though there's still much more to explore and I'm interested to see what direction it takes after I leave. This experience has taught me not just about fluid power and, more specifically to my project, rheology, but also about the pros and cons of full-time lab work and what I might expect if I choose to go to grad school a few years from now. I think what I have enjoyed most has been the freedom to take the research in any direction we want, while also having the constant guidance of a faculty member much more knowledgeable and experienced than I to steer and develop our thoughts. I've learned a lot from my advisor and lab group members alike, and I believe I'm going back to school with a better grasp on what to expect from my future in science and engineering.
I'm presenting to my lab group during our meeting this Friday (wish me luck!), but I've attached a photo of the poster I laid out for this project so you all can peruse it. It's been great reading your blogs this summer and getting to see my project as part of the greater narrative of fluid power that all of our work combined creates. I hope you've all had fantastic summers and have even better school years to look forward to, and thanks so much to Alyssa for putting so much into this experience and making it so worthwhile.
Best of luck with your last few days of work, and please keep in touch!
Nikita
These past few weeks, I've shifted my focus away from Newtonian oils and done some preliminary work with non-Newtonian fluids, since our ultimate goal is to be able to co-design both the surface and the fluid in order to improve lubrication even more. Our non-Newtonian results have been promising; the stress reductions seem to show the same pattern as the Newtonian fluids did, with the symmetric depth texture causing significantly more of a drop than the linear slope depth. The normal force data is a little less clear right now, as while the fluids have been producing forces even with the flat plate, the difference in force production between the flat plate and the textured plates seems largely negligible. We haven't done any repeat testing yet, however, so this may clear up more when we are able to go back and do multiple trials on the same fluid.
Overall, I'm leaving this project feeling pretty good about the progress we've made, though there's still much more to explore and I'm interested to see what direction it takes after I leave. This experience has taught me not just about fluid power and, more specifically to my project, rheology, but also about the pros and cons of full-time lab work and what I might expect if I choose to go to grad school a few years from now. I think what I have enjoyed most has been the freedom to take the research in any direction we want, while also having the constant guidance of a faculty member much more knowledgeable and experienced than I to steer and develop our thoughts. I've learned a lot from my advisor and lab group members alike, and I believe I'm going back to school with a better grasp on what to expect from my future in science and engineering.
I'm presenting to my lab group during our meeting this Friday (wish me luck!), but I've attached a photo of the poster I laid out for this project so you all can peruse it. It's been great reading your blogs this summer and getting to see my project as part of the greater narrative of fluid power that all of our work combined creates. I hope you've all had fantastic summers and have even better school years to look forward to, and thanks so much to Alyssa for putting so much into this experience and making it so worthwhile.
Best of luck with your last few days of work, and please keep in touch!
Nikita

Final Post - End of Research
It's hard to believe my REU is nearly over! I have a few more meetings today, and then a poster show tomorrow (see my poster at the end of this post!). My research has gone pretty well though, and I'm excited to present it.
My project this summer was modelling a new pressure-controlled, hydro-mechanical transmission (PCHMT) for mid-size wind turbines in Simulink. I optimized and configured the transmission, and then examined its operation over several different wind speeds. I found that the best configuration using commercially available components looked like this:
 The planetary gears were sized to have a ratio of 1:16, the variable pump was sized to 110 cc/rev, and the pressure-controlled transmission (PCT) -- the motor-like component on the right -- was sized to 63 cc/rev. The PCHMT's core component is this PCT, which is basically a more efficient compact hydrostatic transmission (pump connected to motor) based on a vane pump with a floating ring at the output shaft.
The planetary gears were sized to have a ratio of 1:16, the variable pump was sized to 110 cc/rev, and the pressure-controlled transmission (PCT) -- the motor-like component on the right -- was sized to 63 cc/rev. The PCHMT's core component is this PCT, which is basically a more efficient compact hydrostatic transmission (pump connected to motor) based on a vane pump with a floating ring at the output shaft.
The PCT makes the system highly efficient - the transmission's efficiency was about 80% for wind speeds of 5 m/s to 11 m/s. This means that the PCHMT is a pretty good alternative to traditional mechanical gearboxes for wind turbines: it is efficient, as well as compact, reliable, less expensive to maintain, and commercially available (like all hydraulic transmissions for mid-size turbines).
While I met my goal of having efficiency data from an optimized system, I had hoped to compare it to similar data from other hydraulic transmissions (hydrostatic, a different hydro-mechanical). However, I did not have time to complete a dynamic simulation (one where the wind speed changes during simulation, to model real-life wind turbulence), so I could not compare my data to the other transmissions that were previously modeled with turbulence included. However, I hope that other researchers on my team will be able to use my Simulink model to complete a dynamic simulation with little trouble and empirically compare the PCHMT to other transmission options.
Aside from my simulation's results, I gained both knowledge and experience this summer that I believe will help me as I start my career. My new knowledge about wind turbines should be very helpful, since I'm considering renewable energy (specifically wind turbines or solar panels) as a career focus. Also, I'm sure that my new skills and familiarity with Matlab and Simulink will come in handy in both my future schooling and career. Modelling and simulations are important in a lot of engineering, so I think I can apply the skills from this summer to a variety of projects.
If there was one thing I wished I had done differently during my REU, I would have to say I wish I had made more effort to be in contact with my post-doc mentor. While working out problems on my own improved my understanding of the system and familiarity with Matlab, I feel like I could have worked more efficiently if I had asked my post-doc for help sooner. I guess this would be my advice to future REU's: your grad student mentor is there to help you learn - while you shouldn't be utterly dependent on them for problem-solving, they usually have great advice and knowledge that will move your project along more quickly.
Overall, I had a great time this summer while learning about renewable energy, gaining simulation skills, and generally enjoying the Twin Cities in the summer. I hope everyone's research went as well as mine, and I'm looking forward to reading about your projects!
Best wishes everyone,
Hannah

My project this summer was modelling a new pressure-controlled, hydro-mechanical transmission (PCHMT) for mid-size wind turbines in Simulink. I optimized and configured the transmission, and then examined its operation over several different wind speeds. I found that the best configuration using commercially available components looked like this:

The PCT makes the system highly efficient - the transmission's efficiency was about 80% for wind speeds of 5 m/s to 11 m/s. This means that the PCHMT is a pretty good alternative to traditional mechanical gearboxes for wind turbines: it is efficient, as well as compact, reliable, less expensive to maintain, and commercially available (like all hydraulic transmissions for mid-size turbines).
While I met my goal of having efficiency data from an optimized system, I had hoped to compare it to similar data from other hydraulic transmissions (hydrostatic, a different hydro-mechanical). However, I did not have time to complete a dynamic simulation (one where the wind speed changes during simulation, to model real-life wind turbulence), so I could not compare my data to the other transmissions that were previously modeled with turbulence included. However, I hope that other researchers on my team will be able to use my Simulink model to complete a dynamic simulation with little trouble and empirically compare the PCHMT to other transmission options.
Aside from my simulation's results, I gained both knowledge and experience this summer that I believe will help me as I start my career. My new knowledge about wind turbines should be very helpful, since I'm considering renewable energy (specifically wind turbines or solar panels) as a career focus. Also, I'm sure that my new skills and familiarity with Matlab and Simulink will come in handy in both my future schooling and career. Modelling and simulations are important in a lot of engineering, so I think I can apply the skills from this summer to a variety of projects.
If there was one thing I wished I had done differently during my REU, I would have to say I wish I had made more effort to be in contact with my post-doc mentor. While working out problems on my own improved my understanding of the system and familiarity with Matlab, I feel like I could have worked more efficiently if I had asked my post-doc for help sooner. I guess this would be my advice to future REU's: your grad student mentor is there to help you learn - while you shouldn't be utterly dependent on them for problem-solving, they usually have great advice and knowledge that will move your project along more quickly.
Overall, I had a great time this summer while learning about renewable energy, gaining simulation skills, and generally enjoying the Twin Cities in the summer. I hope everyone's research went as well as mine, and I'm looking forward to reading about your projects!
Best wishes everyone,
Hannah

Tuesday, August 5, 2014
My 2014 REU Experience
There's no way 10 weeks have passed by this summer already. This research just flew by! My experience has been truly great at the University of MN - Twin Cities for many reasons. First off, the faculty and fellow REU students are great people, both helpful and nice.
Then comes the research... both challenging and exciting! The freedom and demand of determination both drew me in. My advisors were helpful when I needed it, but really let me work my way through projects and tasks I was given. When task were successful, it was a great feeling. Probably the best part of my research was developing heat transfer calculations (code in MatLab) for a quick moving open/ closed system (combustion chamber). The completion of this really gave me a great feeling as it showed positive influences on heat release calculations and analysis after working very hard on it. In terms of how successful my whole summer research was, I think it was moderately successful. I think this is because the project is at somewhat of a standstill as the group is trying to optimize the engine's combustion through test that take a good amount of time. Unfortunately, my advisors will have to start moving the research to a new location to make room for renovation in the current building. Anyways, I think this slow down caused me to spend more time behind my computer than I thought I would too. I'm more of a hands on guy, but I actually didn't mind all the complexity and technology that lies with this project.
How did this research affect my future plans? A lot. I really think I will be striving to attend grad school and participate in some amount of research. I believe the much larger amount of involvement with and knowledge of my future project will draw me in significantly more. I'll really be able to control a lot more of the project's success and direction.
Finally, I want to thank some people. Prof. Sun allowed me the great opportunity and gave me an experience I won't forget. My graduate advisors, Ke Li and Chen Zhang, welcomingly helped me and guided me to a successful experience. Alyssa, you're the best. Jose, Hannah, Faith and Alec.. I know I wasn't around as much as most of you but it's always nice seeing you guys and thanks for the help at times! Thank you all and I will be seeing soon to knock this poster presentation out of the park!
Good luck to everyone as you wrap up your research!
Best Regards,
Brad
Renewable Energy Trip to Morris!
Hi everyone,
Even though my REU is winding to a close, I wanted to post really quick about an awesome trip my research team went on since my last post. (Fear not - there will be one final post showing my results from the summer, which I'm currently working around the clock to finish polishing).
About a week and a half ago, a few professors, grad students, Jose, and I drove to the U of M Morris campus to learn about their renewable energy and agriculture research there. We learned about their solar systems (both photovoltaic for electricity and thermal for water and heating), biomass gassification system, their hydrogen/ammonia production, and their renewable agriculture practices.
The highlight though was definitely getting to see their two wind turbines up close. It was super
windy, so walking up to the base of the turbine was a little scary - all you can think about is these giant blades whooshing towards your head! We could also hear the tower (the tall support structure) groaning in the wind, which wasn't very reassuring. We even got to step inside the base of the tower, although it was too dangerous to climb to the top where the gearbox (which relates most closely to my research this summer) is kept.
All in all, the trip was probably one of my favorite experiences during my REU. I'm seriously considering focusing on renewable energy for my career, so it was great to see some of the current technology in-person (especially the solar and wind systems). Morris is also a center for agriculture research, which reminded me of home - it was nice to see the familiar sights of farming again after two months in the Twin Cities. I'm really glad I got to have this experience - extra thanks to Alyssa for organizing it!
Even though my REU is winding to a close, I wanted to post really quick about an awesome trip my research team went on since my last post. (Fear not - there will be one final post showing my results from the summer, which I'm currently working around the clock to finish polishing).
About a week and a half ago, a few professors, grad students, Jose, and I drove to the U of M Morris campus to learn about their renewable energy and agriculture research there. We learned about their solar systems (both photovoltaic for electricity and thermal for water and heating), biomass gassification system, their hydrogen/ammonia production, and their renewable agriculture practices.
 | |
| Wind turbines at Morris, courtesy of Jose! |
windy, so walking up to the base of the turbine was a little scary - all you can think about is these giant blades whooshing towards your head! We could also hear the tower (the tall support structure) groaning in the wind, which wasn't very reassuring. We even got to step inside the base of the tower, although it was too dangerous to climb to the top where the gearbox (which relates most closely to my research this summer) is kept.
All in all, the trip was probably one of my favorite experiences during my REU. I'm seriously considering focusing on renewable energy for my career, so it was great to see some of the current technology in-person (especially the solar and wind systems). Morris is also a center for agriculture research, which reminded me of home - it was nice to see the familiar sights of farming again after two months in the Twin Cities. I'm really glad I got to have this experience - extra thanks to Alyssa for organizing it!
Monday, August 4, 2014
Final Post
All great things must come to an end and this incredible experience of conducting summer research at the U of M is no exception. The research process was long and grueling but very rewarding as I learned more in these last two months about practical engineering than I did all year at school. I had many set backs machining parts I needed for my experimental set up and that has taught me that you can't just make everything you draw up in CAD, you have to think HOW you are going to cut each piece and if it will stand up to the stress/pressure you require it to. That being said I did finally create a custom manifold to allow a laser micrometer to record the displacement of check valve poppets under different pressure differentials and tank/load switching frequencies. The final experimental set up (after a lot of headaches and fixing leaks) was the following:
.JPG)

With this set up I recorded the poppets movement and found something interesting! operating at a system pressure of 1500, a tank/load duty cycle of .5, and an experiment running time of 10 seconds I obtained the following result:
You can see as the poppet returns to its seat that it makes a little rebound after the initial contact with the seat! This combined with the pressure sensor data shows great promise that my theory of the poppet rebounding as it hits the seat could be the reason why the check valves leak in switch-mode circuits.
As the reseach begins to windddd down
So I plan to post ONE more time after this as a wrap up, but I wanted to just write to write.
This research has been a blast and the best thing about my summer by far. Hannah and I were able to make it up to Morris to look at an actual Wind Turbine, simply put it was amazing. To be honest it was intimidating to be next to one of these super structures. As the turbine spins in the air, you can literally hear the blades slice through the air screaming. It was pretty inspiring to be honest. Knowing what I am working on could make it to application one day to help improve the green energy effort.
So this entire week I'll be rushing to get my poster work, It's a Monday and our poster is due TOMORROW! So I'll be focusing all my efforts on that now after this post. I hope everyone is thriving with their own REU research.
Week 7
I don't know when I decided to become an engineer.Throughout my life I've learning how to repair and troubleshoot with my father on various projects.
I guess it all started when I was a child (flashback waves) and I would play with my duplo blocks and create many just about anything from buildings to planes. I would at times watch and help my dad fix things around the house.
As I got older I would assist my father in fixing our cars and what a knuckle busting experience that was and still is. If I was to put a time to when I truly decided to become an engineer it was when I was in high school. At first I wanted to make video games which would be software engineering but after that didn't work out I switched over to Industrial and Systems Engineering and kinda fell in love with the manufacturing side of ISE.
Its been kind of a struggle but its well worth it I believe.
I guess it all started when I was a child (flashback waves) and I would play with my duplo blocks and create many just about anything from buildings to planes. I would at times watch and help my dad fix things around the house.
As I got older I would assist my father in fixing our cars and what a knuckle busting experience that was and still is. If I was to put a time to when I truly decided to become an engineer it was when I was in high school. At first I wanted to make video games which would be software engineering but after that didn't work out I switched over to Industrial and Systems Engineering and kinda fell in love with the manufacturing side of ISE.
Its been kind of a struggle but its well worth it I believe.
Friday, August 1, 2014
Final Week
Hello everybody. I'm sure you're all busy preparing your deliverables, but since my partner's SURE Robotics program ends August 1st we have already finished our project. Here's a short refresher of what my project is all about. This is continuation of a project from Lauren's masters thesis and our job was to develop a pneumatic robotic device that can rotate the wrist. This procedure will allow automated performance of repetitive facilitation exercise (RFE) to treat stroke patients and involves synchronizing the brain stimulus with a mechanical stimulus. Currently, RFE is performed by a therapist but the variability is high because RFE requires precision within milliseconds, a feat impossible for humans. The challenge of the project is to make a fully MRI compatible device that is precise, so that RFE treatment can be repeated many times exactly the same way. The overall purpose is to optimize RFE by monitoring a patient through fMRI and to determine the best way to treat stroke patients.
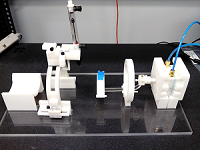
We needed to build a prototype and make sure the accepted precision of the device is within +15 ms and a standard deviation of less than 5 ms. We designed a vane actuator, where compressed air rotates a shaft by pressurizing one side of a chamber. We also fabricated the coupling system between the hand clamp and the shaft, a rotary support to reduce the stress on the shaft, and put everything together from the ground up (note the part with the cylinder was made by the previous year's project). The last step is to conduct experiments to validate the accuracy of the robot. After much difficulty finding an adequate measuring instrument, we finally managed to determine the maximum standard deviation of the vane actuator is 2.9 ms with pressures over 30 psi. Then, a test is conducted on the final prototype with a load and fortunately the maximum deviation is calculated to be 4.4 ms with pressures over 42 psi. All in all, our project did meet the requirements for performing RFE but improvements should definitely be made. For instance, there is a significant amount of air leakage in the vane actuator which means the device is very inefficient. Moreover, the majority of the parts are 3D printed due to time constraints so the device needs to be made stronger.
I definitely learned a lot during my CCEFP experience. As it is my first time being involved in such a program, I figured out you can't be afraid to tackle on new problems. There will always be miscellaneous issues on the way and you can't let it dishearten you. Rather, it is important to struggle and do your best to make the most out of the situation. I had a lot of difficulty manufacturing certain parts for the project, but in the end the hands-on experience taught me much more about design than any class could. Well, I'm still working on my research paper, trying to make it as comprehensive as possible for my adviser, so I'll close off this blog by saying thanks to everybody who made this experience possible. To Alyssa, all my fellow REUs, and those who helped me from the CCEFP!
We needed to build a prototype and make sure the accepted precision of the device is within +15 ms and a standard deviation of less than 5 ms. We designed a vane actuator, where compressed air rotates a shaft by pressurizing one side of a chamber. We also fabricated the coupling system between the hand clamp and the shaft, a rotary support to reduce the stress on the shaft, and put everything together from the ground up (note the part with the cylinder was made by the previous year's project). The last step is to conduct experiments to validate the accuracy of the robot. After much difficulty finding an adequate measuring instrument, we finally managed to determine the maximum standard deviation of the vane actuator is 2.9 ms with pressures over 30 psi. Then, a test is conducted on the final prototype with a load and fortunately the maximum deviation is calculated to be 4.4 ms with pressures over 42 psi. All in all, our project did meet the requirements for performing RFE but improvements should definitely be made. For instance, there is a significant amount of air leakage in the vane actuator which means the device is very inefficient. Moreover, the majority of the parts are 3D printed due to time constraints so the device needs to be made stronger.
I definitely learned a lot during my CCEFP experience. As it is my first time being involved in such a program, I figured out you can't be afraid to tackle on new problems. There will always be miscellaneous issues on the way and you can't let it dishearten you. Rather, it is important to struggle and do your best to make the most out of the situation. I had a lot of difficulty manufacturing certain parts for the project, but in the end the hands-on experience taught me much more about design than any class could. Well, I'm still working on my research paper, trying to make it as comprehensive as possible for my adviser, so I'll close off this blog by saying thanks to everybody who made this experience possible. To Alyssa, all my fellow REUs, and those who helped me from the CCEFP!
Subscribe to:
Comments (Atom)